网红送餐机器人 智能表象下的“无人”困境与自动驾驶的深层挑战

在餐饮行业,网红送餐机器人以其呆萌的外形和自主移动能力吸引了众多目光,成为餐厅的科技招牌。当人们为“无人化”服务惊叹时,一个根本性问题浮出水面:离开了背后持续的人工干预、监控与维护,这些机器人的“智能”究竟能独立走多远?这实际上指向了人工智能,尤其是以自动驾驶为代表的技术,在走向真实、复杂世界时所面临的核心难点。而这些难点,很大程度上根植于人工智能基础软件开发的深水区。
网红送餐机器人所展现的,更多是限定场景下的“弱智能”。它们通常在预设地图、固定路线、结构化环境中运行(如平整地面、明确通道),避障逻辑相对简单。其智能高度依赖环境的高度可控性。一旦遭遇未预见的障碍(如突然放置的行李箱、奔跑的儿童)、复杂的地面变化(如临时铺设的电缆、湿滑水渍)或需要与人进行非标准交互时,机器人的决策能力便迅速捉襟见肘,往往需要人工远程接管或现场处理。这揭示了人工智能从封闭实验室走向开放动态环境的第一个难关:对环境不确定性与长尾问题的处理能力。现实世界是无限丰富且充满意外的,开发能够覆盖所有“极端案例”(Corner Cases)的感知与决策系统,在工程和算法上近乎不可能。
这直接引向了自动驾驶(可视为在更复杂、高速、高风险的开放道路环境中运行的“送餐机器人”)的核心难点。其挑战是多维度且相互交织的:
- 感知的可靠性:自动驾驶系统依赖传感器(摄像头、激光雷达、毫米波雷达等)感知世界。难点在于如何在不同天气(雨、雪、雾、强光)、不同光照条件下,稳定、准确地识别和分类各种物体(车辆、行人、交通标志、施工区域等),并理解它们的意图(那个行人要过马路吗?那辆车会突然变道吗?)。当前技术对清晰、规范的场景表现良好,但对模糊、遮挡、罕见物体或对抗性干扰(如特意设计的贴纸误导识别)的鲁棒性不足。
- 预测与决策的复杂性:感知之后,系统需要对周围交通参与者未来的行为进行预测,并据此做出安全、高效、符合交规的决策。这涉及对不确定性的量化、对人类行为微妙之处的理解(如手势交流、礼貌让行),以及在道德和法规框架下处理两难困境(如不可避免的事故中如何选择)。这类高层次认知和伦理判断,是目前基于数据和规则的系统难以完全掌握的。
- 系统的安全性与验证:如何证明自动驾驶系统比人类驾驶员更安全?传统汽车工业通过大量测试验证可靠性,但自动驾驶面临的状态空间是天文数字。即使有数百万公里的路测,也难以穷举所有可能场景。这就需要创新的验证方法,如大规模仿真测试、形式化验证等,但这本身也是巨大的技术挑战。
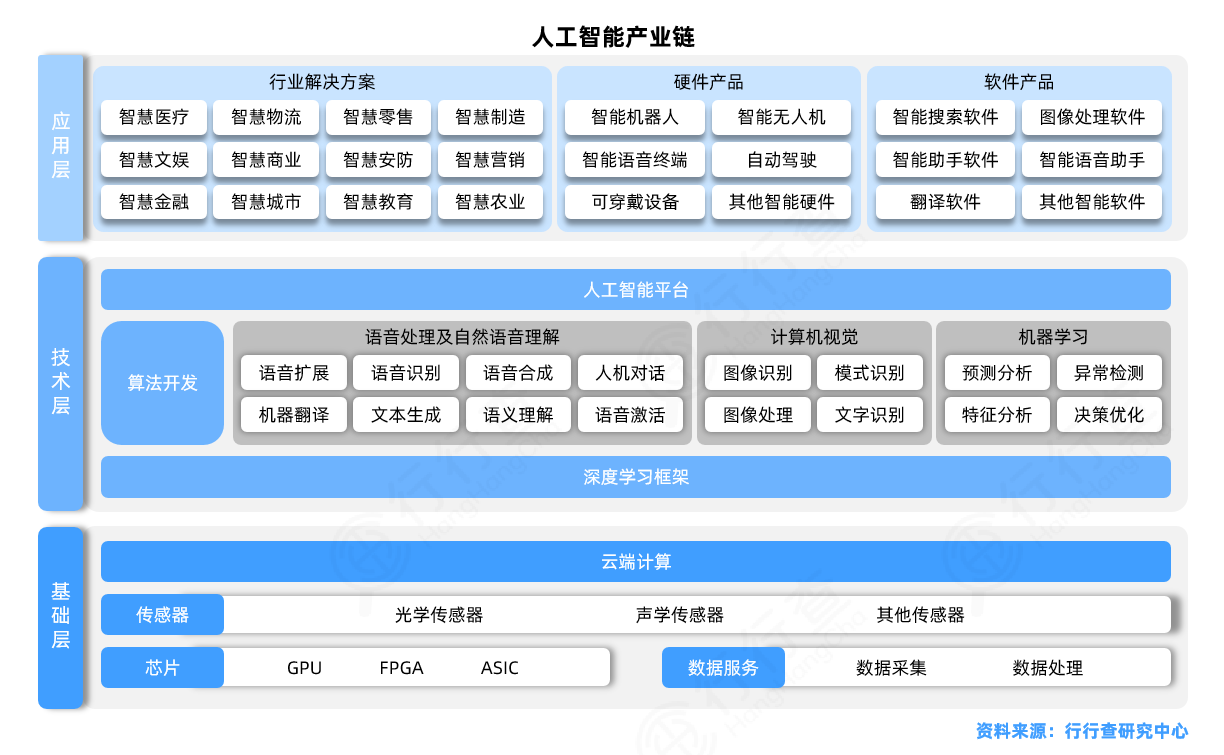
而这些应用层难点的背后,更深层、更基础的制约因素在于人工智能基础软件开发。这包括:
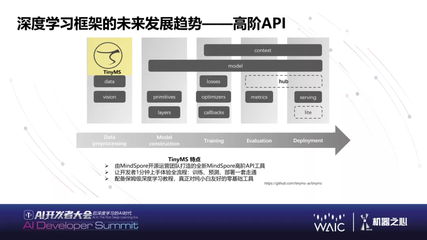
- 框架与工具的成熟度:深度学习框架(如TensorFlow, PyTorch)极大地促进了算法开发,但在将其部署到要求实时性、可靠性、低功耗的车规级硬件上时,仍存在工具链不完善、优化难度大、软硬件协同设计挑战多等问题。
- 数据获取、标注与管理的系统性难题:AI模型的性能严重依赖数据。自动驾驶需要海量、高质量、多样化的标注数据,尤其是那些罕见但危险的“长尾场景”数据。数据的采集、清洗、标注、版本管理、隐私保护构成了一个庞大而昂贵的系统工程。
- 算法本身的可解释性与鲁棒性缺陷:深度神经网络如同“黑箱”,其决策过程难以解释,这在涉及安全的领域是重大隐患。模型对对抗性样本的脆弱性,也威胁着系统的安全。开发更透明、更鲁棒的基础算法是根本需求。
- 中间件与系统集成:自动驾驶系统是传感器、计算平台、控制单元组成的复杂系统,需要高效的通信中间件(如ROS 2, DDS)来确保实时可靠的数据流转。如何设计稳健、可扩展的软件架构,集成多源异构的软硬件模块,是确保系统整体可靠性的关键。
因此,“网红送餐机器人”的局限,是当前人工智能技术处于特定发展阶段的一个缩影。它的“智能”是狭窄的、有条件的,背后隐藏的是从基础软件到核心算法,再到系统集成的一系列待攻克难关。自动驾驶作为AI技术的集大成者,正将这些难点放大并置于安全至上的严苛考场上。真正的“智能”,并非简单地移除“人工”,而是通过更先进的基础软件、更强大的算法和更系统的工程能力,让机器能够像人一样,在充满不确定性的世界中,进行可靠的理解、预测与行动。这条道路,依然漫长。
如若转载,请注明出处:http://www.dimaowanju.com/product/62.html
更新时间:2026-06-19 23:08:30